1. 作品序号:B-1-5
2. 作品名称:楼梯护栏清洁机器人
3. 主题类别:本科——竞赛主题
4. 参赛学校:山东大学
5. 参赛学生:刘怡舟 高润 刘浩华 李露瑶 徐大森
6. 指导教师:李凯岭 牛军川
7. 作品简介:
楼梯扶手机器人的应用领域和技术原理、用途
楼梯扶手机器人是可以在高低曲折的楼梯扶手上运动并完成作业的自动化机器人。利用这种运动特性,我们研制了楼梯扶手清洁机器人,它能在楼梯间的起伏曲折的楼梯扶手上进行繁复的清洁工作。其清洁效率高,运行稳定,操作便捷,为高楼大厦建成后繁重的保洁工作提供了切实可行的解决方案。
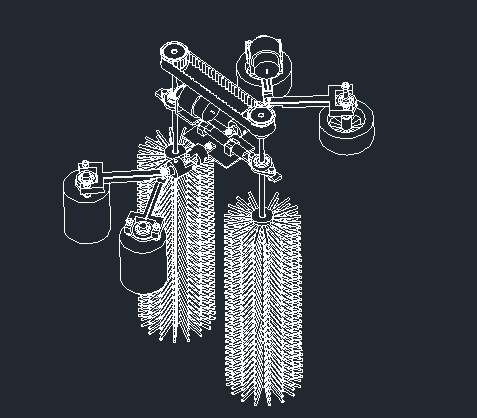
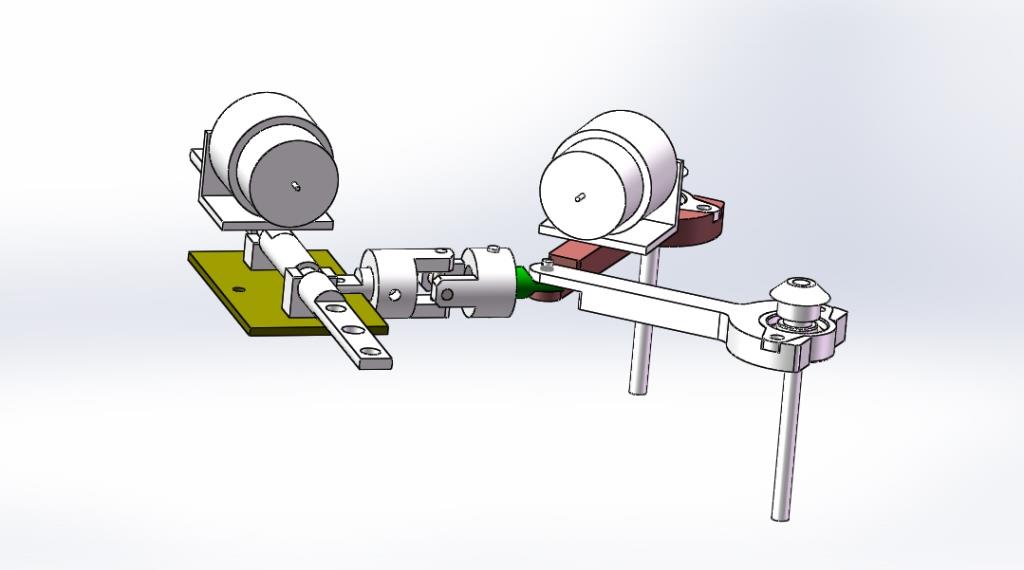
利用solidworks建立模型如下图示,这款楼梯清洁机器人主要由移动系统、支撑系统、清洁系统、控制系统,四大系统组成。
(1)移动系统:采用直流伺服电机对机器人移动系统进行驱动。将动力加在机器人前面一组滚轮其中一个上,通过该滚轮带动机器人前进。在转弯时巧妙利用拐角处楼梯扶手对滚轮的作用力完成转向。
(2)支撑系统:采用支撑板提供的正压力与滚轮提供的摩擦力相互结合的方法将这个整个机器人支撑在楼梯扶手上,并加上滚轮在夹持装置的作用下对扶手侧面产生的正压力使整个机构稳定。
(3)清洁系统:主要由***在机器人车两侧的毛刷和加装在支撑板下的清洁装具构成。
(4)控制系统:电机控制:采用上下位机控制方式,选用DSP控制芯片,发射端使用tt2262编码,用ook方式将编码后的数据调制在315兆赫兹的载波上,发射至接收端,接收端用超外插方式调谐解调出编码数据,用单片机处理数据后通过L298N驱动电机,实现无线遥控并进行遥控控制机器人运动。
该装置的创造性、实用性主要有以下五方面:
(1)运动方式的改善:用前臂单轮驱动代替前臂双轮驱动,省去了外加的转弯导向机构,简化设计,降低了机器人重量和成本。
(2)布局的改善:将电池额位置由支撑板上调整到前臂上并位于电机相对的那一侧夹持架上,节省了空间,同时也平衡了电机质量对整个装置带来的不平衡。
(3)动力系统的改善:电源由电瓶改为锂电池,大大减轻了质量。
(4)连接装置的改善:用万向联轴器代替球铰。
(5)安装方式的改善:将连接毛刷的轴承由沿轴的径向放置改为轴向放置,节省了空间和材料。