1. 作品序号:B-3-18
2. 作品名称:双足机器人
3. 主题类别:竞赛主题
4. 参赛学校:山东工商学院
5. 参赛学生:辛瑜,刘爽,曹亚萍,李楠,周垠吟
6. 指导教师:隋金雪
7. 作品简介:
(1)本机器人通过STM32芯片控制一系列RDS3109MG型舵机,实现上电后机器人的站立、行走、翻跟头等行为。其可应用于家庭或公园娱乐以及市场宣传等。
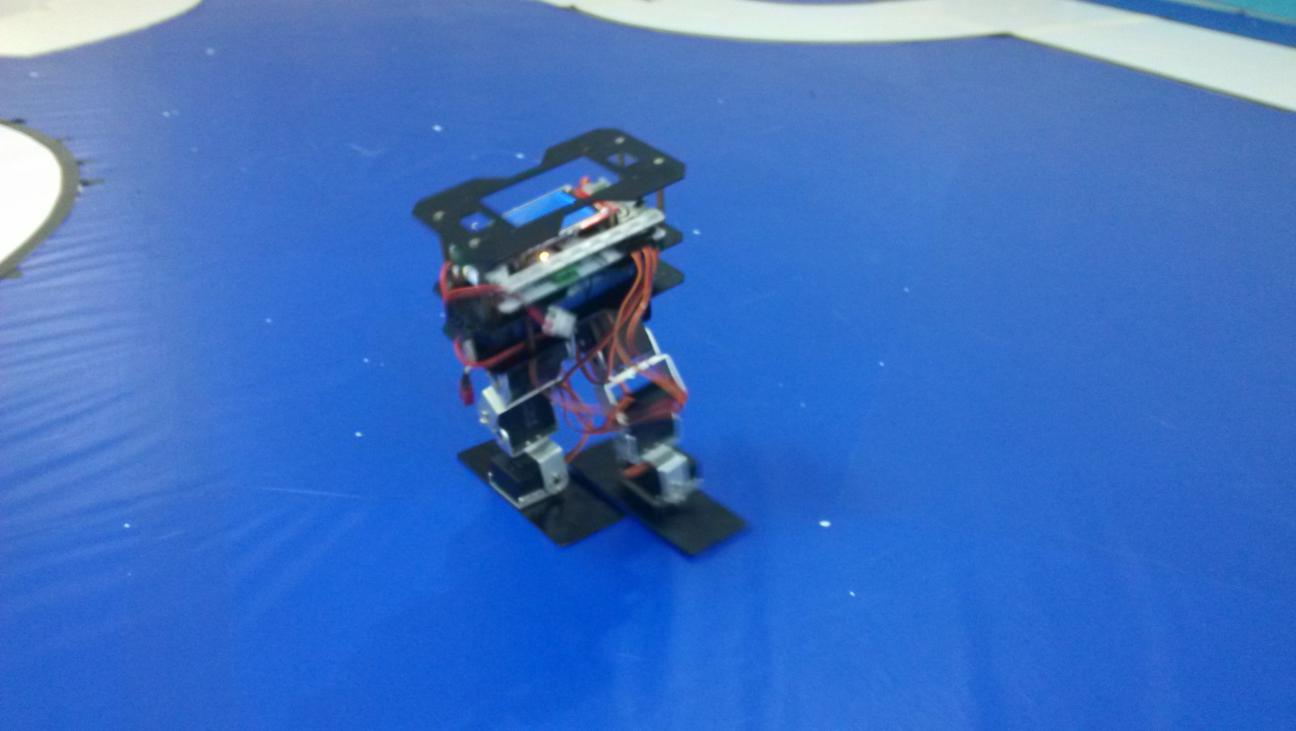
(2)本机器人由上往下为以STM32系统板为核心的电路板、电池、舵机,双足机器人整体上为25*15*5(cm),小巧灵活,造型简明,结构上稳定且牢固,主要使用舵机也使修整较为便捷。
(3)作品的创造性在于在行走的基础上实现翻跟头的功能,娱乐性较强,而且在现实场合当中,还可用于市场宣传,在双足机器人上添加相关饰品,节省人力的同时可以增强娱乐性,且更具吸引力,从而达到更好的宣传效果。
(4)本机器人集娱乐与宣传为一体,结构简单,经济实用。
(5)本机器人的机身具有很强的可塑性,可以通过改造硬件系统将小机器人的机身改造成各种形象,如人物、卡通动漫等,在实现其自身价值的同时还可以让人眼前一亮,更具吸引力。另外,也可以根据应用的场合以及其要实现的具体功能来对其机身大小进行改造。
(6)作品图片如下: